The Team Monitoring System
The Team Monitoring System in TeamAware encompasses two major developments: the Continuous Indoor Outdoor Localisation System (COILS) and the Activity Monitoring System (AMS). Both have been already introduced in TeamAware Blog here for COILS and here for the AMS.
To ease the reader’s task, brief introduction for both systems is provided first, then the new achievements are described.
Introduction to COILS:
COILS is an indoor localisation and tracking system, aiming at providing a seamless localisation of the people in GNSS-available and GPS-denied environments. It can also be augmented by ancillary wearable sensors (e.g., heart pace, carbon dioxide sensor), becoming a wearable safety system, conveying information about the location, health status and nearby environmental hazards.
COLIS is based on coin-size, lightweight, foot-mounted IMU and magnetometer sensors, linked to a pocket-size Control Unit, in charge of managing:
- the data coming from optional ancillary sensors (e.g., GNSS receiver, altimeter, heart pace),
- the communication from/to the external world (e.g. WiFi, 3G/4G, BT, Lora, radio modem).
Working principle: the COILS System (the next figure shows a prototype) is based on:
- a small Sensor Unit (SU) to be fastened on the shoe or located inside it (red circle);
- a control unit MCU (Master Control Unit), providing power to the foot-mounted sensor, log its data and manage the external communication;
- a software on the PC (ARIANNA-MAP) to display the path on a map view in real time and implement processing refinement techniques.

COILS Achievements:
The recent achievements have been the offspring of the research performed around two major pillars:
- geomagnetic fusion,
- GNSS-inertial fusion,
Geomagnetic fusion
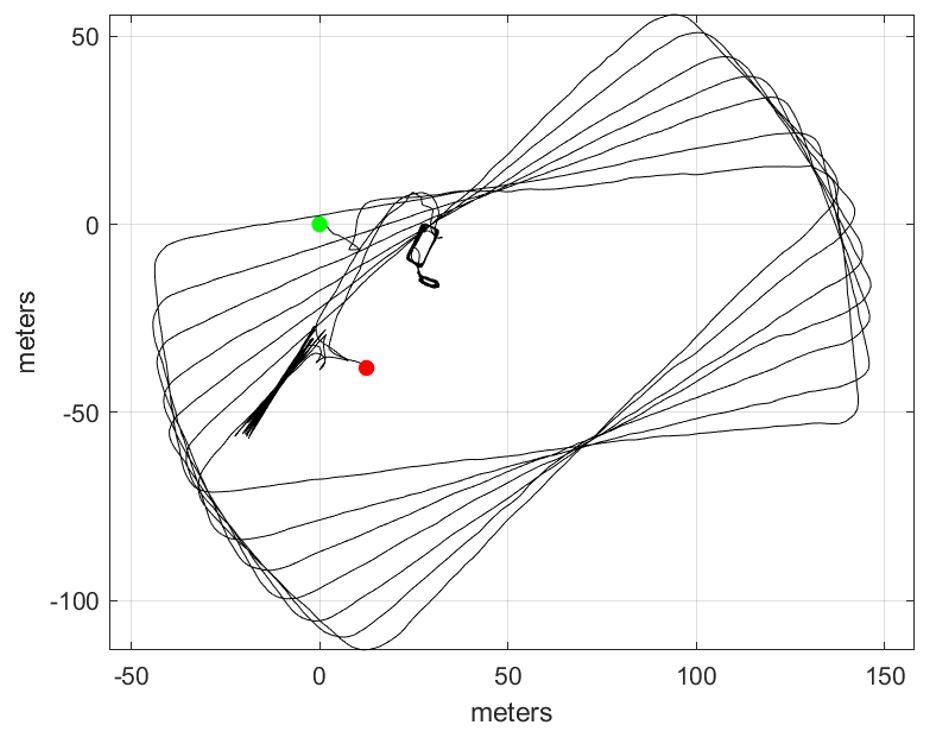
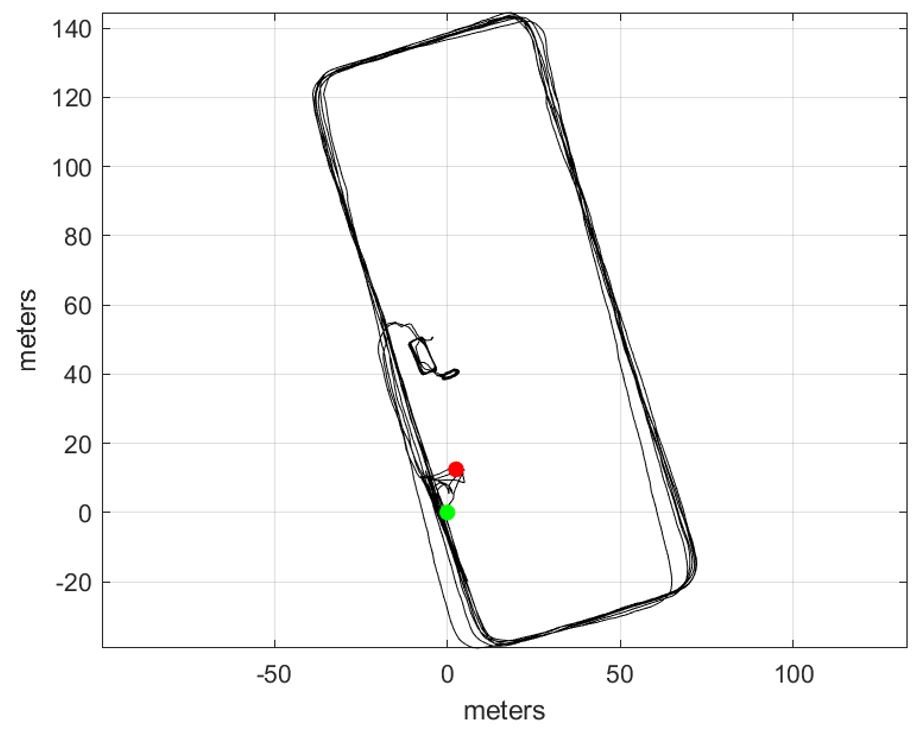
Albeit the localisation processing implements powerful error-control and minimisation mechanisms, the low grade of the employed IMU units causes a slowly variable drift in the estimated horizontal position. Based on the information coming from a 3d magnetometer, DUNE has developed (and patented) an effective drift estimation and compensation paradigm, with low computational load, capable of providing accuracies as low as 0.5% of the walked distance. The following figure shows a 4.7 km path walked (mix of walk, run, stairs) in a dense and magnetically polluted urban environment, with and without the geomagnetic fusion introduced in TeamAware (no GNSS information has been used).
GNSS-inertial fusion
GNSS has complementary pros and cons with respect to inertial estimation. On the one hand, the pro of the GNSS is the availability of an absolute position estimate that under certain conditions can reach a few centimetres. On the other hand, the cons of the GNSS are the unavailability in indoor environments and the poor outdoor accuracy in urban environments, due to the multipath phenomenon (reflection of the satellite signal on the buildings). In a typical urban scenario, the error can reach tens of meters. In this frame, COILS must also exploit the GNSS information, taking into account that it might be fragmented, intermittent, with high HDOP (Horizontal Dilution Of Precision).
DUNE has developed a brand-new paradigm for the fusion between the GNSS fixes and the horizontal inertial position. The approach, based on a three-stages cascade problem solution, is performed at “step rate” (e.g., 1 Hz) and not at IMU sampling rate (e.g., 200 Hz). It has been on-field tested and validated in a widespread ensemble of mixed scenarios.
The next figure represents one of the results achieved in dense urban scenario (Central Railway Station in Rome, Italy), with intermittent and fragmented GNSS fixes (blue dots), largely unavailable in the indoor part, and with highly variable HDOP in the outdoor part. The purely inertial path (red) is affected by a significant drift, jeopardising the interpretation possibilities. The GNSS-inertial fusion result (blue) has effectively removed the drift, re-establishing the path compliance with the ground truth.


Introduction to AMS:
Activity Monitoring System (AMS) is a subsystem of Team Monitoring System (TMS) which is responsible of monitoring the health and activity of the first responders. AMS will provide the classified activity data (sitting, standing, walking, kneeling, crouching etc.) of the first responders to track the physical phases of their operations by the operation centre and the other first responders in the operation field. In addition, AMS will provide the health data of the first responders in the field consisting of heart rate, body temperature, respiration rate, and blood oxygen level. AMS will also provide anomaly detection (fatigue, stress level etc.) by the implemented algorithms using the sensor data as the input.

AMS Achievements:
At first, version 1 hardware and software of the AMS motion tracking modules and gateway have been completed. Then, the first version of the motion tracking algorithms have been implemented as convolutional neural network (CNN) and recurrent neural network (RNN) based algorithms. After the benchmarking of the algorithms on a real-life dataset, CNN based classification algorithm has been chosen to classify the movements of the first responders. Due to the medium-based distortion on the magnetometer data, magnetometer calibration method has been changed into an active and adaptive calibration method and fusion of the inertial measuring units (IMUs) have been changed into a new method to provide accurate and non-drifting quaternion data. First deliverable considering the AMS design of first prototype (D7.2) has been submitted after this phase.
After the submission of the deliverable, the health sensor hub has been chosen for the integration of the health sensors, and algorithm design for the anomaly detection has been started. Health sensor hub and current AMS hardware and software integration has been started. In addition, some of the anomaly algorithms have been implemented. Integration work and meetings with network (WP9), TeamAware software platform (WP10) and TeamAware User Interface (WP11) have been conducted. Critical material for the second version of the AMS sensor hardware has been chosen.
