VSAS-THALES Blog
The main objective of VSAS is to develop a real-time situational awareness system for first responders based on heterogeneous information sources and sensors in an unknown environment starting from the E/O sensors mounted on a drone and on a Helmet.
To address the project scenarios, we are working on a localisation embedded functionalities:
- On The Helmet for localisation purposes is mandatory in a GNSS-denied environment.
The solution that we are integrated allows to:
- localise the First Responder, in particular in indoor environment
- to guide First Responder to come out from a building
- to allow a rescue team to join that First Responder
Currently we are working on the integration of the localisation algorithm in the helmet. The figure below show the Status of the integration.

The Helmet on the figure embeds:
- an SD camera and an inertial measurement unit to acquire the required data;
- a microcontroller ensuring the synchronization of the sensors;
- an embedded computer unit on which the algorithms will be executed (NVidia Jetson TX2);
The localisation solution proposed on the helmet is based on a visuo-inertial solution (VIO), combining inertial data and visual data, thanks to a well-suited fusion algorithm. The localisation solution is an odometry solution that estimate the movement, i.e. the pose (position and orientation) of the subsystem. This kind of solution remains subject to drift. To cancel this drift, it is required to get from time-to-time absolute positions provided by a GNSS sensor when available.
-
On the Drone: an UAV piloting assistance solution, in order to support a non-expert UAV pilot to navigate within unknown and complex indoor environments, the indoor UAV will be equipped with an E/O system with a RGB-D camera and Time-of-Flight ranging sensors, called VCSELs. Specific algorithms will process data coming from the sensors and will prevent the UAV from colliding with the obstacles.Due to stock unavailability on a small indoor drone, Thales worked on the integration of the drone platform. The figure below show the current status of platform.

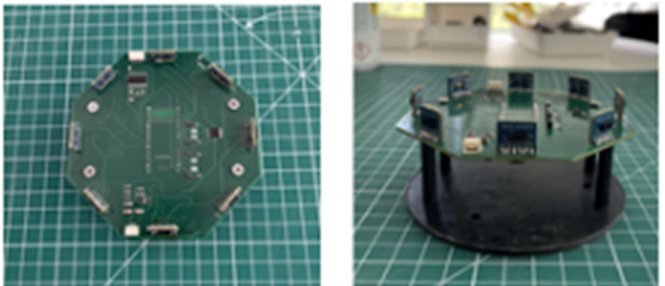
Beside to this unforecasted work that Thales absorbed, the engineers worked on a simulation tools based on ROS to simulate the UAV pilot assistance solution based on VCSEL Lidars. Different configuration were studied. The current VCSEL configuration ( based on 8 VCSELs ) will be tested in the following month in a laboratory framework. This configuration is currently and assembled into a special PCB we developed internally that is shown below.