The Microflown AVISA
Microflown AVISA develops acoustic intelligence, surveillance and reconnaissance (ISR) systems, based on its worldwide unique and patented in-house Acoustic Vector Sensor (AVS) technology.
Based in the Netherlands, Microflown AVISA is an internationally staffed SME spending 70% of efforts on R&D. Next to offering both commercial off the shelf products as well as customized solutions for a global range of customers in defense and security, Microflown AVISA also advises governmental agencies and NATO industry groups in the field of acoustic situational awareness.
Microflown AVISA develops and markets highly innovative and complete battlefield acoustic solutions, providing 3D situational awareness by detecting, localizing and classifying the full range of audible battlefield threats, such as small arms fires, rockets, artillery and mortars and engine driven platforms (heavy ground vehicles, helicopters and UAV's).
KEY BENEFITS OF AVS
The benefits to the user of the acoustic vector sensing technology are:
Low power consumption: persistent operations
Passive: undetectable, flown sensor cannot be jammed
Acoustic; day & night operations, line-of-sight not required, all-weather (temperature, dust, fog, rain, smoke)
Inherent directional: small form factor allows miniaturized sensor packaging
Inherent broadband: simultaneously sensing various threat types having an acoustic signature in low and high frequencies
Microflown AVISA as the leader of the WP6 together with its Greek partner company, CERTH, provides Acoustic Detection System (ADS) for the TeamAware project in which the following objectives will be followed:
Design of a compact and lightweight georeferenced array of acoustic vector sensor to be installed on a UAV
Detection and localization of gunshots and explosions
Detection and localization of people whistling or asking for help (human speech)
The main objective of the ADS of WP6 is to detect and determine the location of explosions or gunshots near first responders. ADS will detect and locate explosions, gunshots, and snipers as well as human voices (e.g., screams asking for help) and whistling in the operations. This is done through an array of acoustic vector sensor and required acoustic signal processing algorithms for rescue purposes. The ADS system can be drone mounted or portable depending on the situation and requirements of end users.
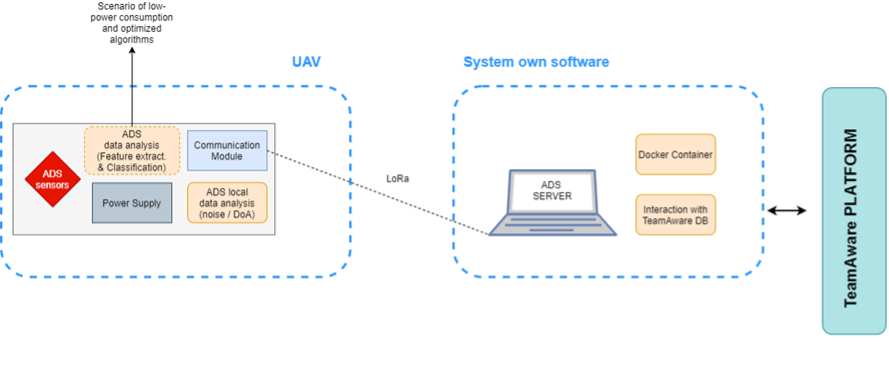
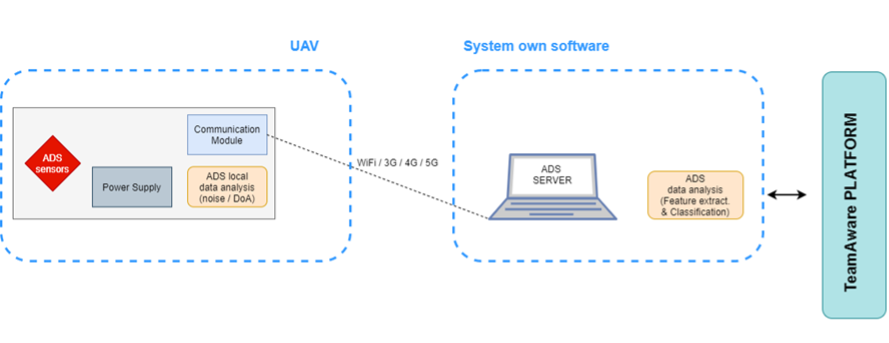
The ADS system will be able to detect and locate the above-mentioned acoustic sources in emergency events (i.e., terrorist attack, search and rescue, natural disasters). An initial implementation of the ADS system will be conducted using commercial equipment by CERTH to prepare and test the relevant algorithms. Then the developed algorithms will be evaluated and modified using a recorded data from an acoustic vector sensor array similar to what it is supposed to be designed and developed for the ADS system. While CERTH will be working on evaluating and developing the algorithms with the recorded data, a prototype of the acoustic vector sensor array with a recording capability will be developed by AVISA to be tested and used on a drone for the system’s tests and demonstrations at the end of the project. Figure 1 illustrates a detailed view of the ADS architecture, regarding its software components.
Acoustic vector sensor
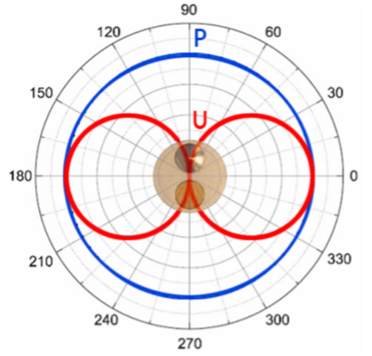
Acoustic vector sensor (AVS), also called particle velocity sensor is a MEMS based sensor enabling measurements of acoustic particle velocity. The very small sized elements are created on silicon wafers using clean room technology. The sensing element consists of two ultra-thin wires. These wires are platinum resistors that act as temperature sensors. They are powered by an electrical current which causes them to heat up. Local temperature variations cause changes in the wires’ resistance. When the sound propagates across the wires, it asymmetrically alters the temperature distribution around the resistors (wires). The resulting resistance difference provides a broad band (20 Hz up to at least 10 kHz) signal with a figure of directivity that is proportional to the acoustic particle velocity. Directivity of a particle velocity sensor (produced by Microflown AVISA) versus a microphone is shown in Figure 2. The Microflown particle velocity sensor provides broad banded directionality, over the entire audio range in the human’s hearing range.

Acoustic Multi Mission Sensor
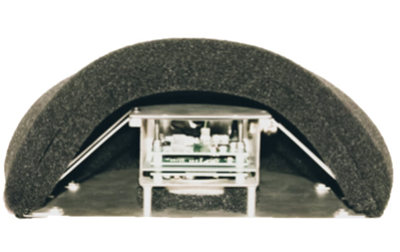
By combining two orthogonally placed Microflown transducers and a microphone into a single wind and weather proof unit, a so called Acoustic Multi Mission Sensor (AMMS) is created. There are two versions of AMMS, with a 30 cm and 23 cm outer diameters. Reducing the diameter implies an increase in the sensitivity to wind, which is important especially for moving platforms. Each AMMS provides directional information. A figure of an AMMS with wind-cap is demonstrated in Figure 4.
For the TeamAware project, AVISA will design a light weight AMMS with a 23 cm diameter footprint that can be installed on a multicopter. This array will equip with a memory and the capability of recording data on it. This will be an important feature for doing tests and algorithm developments especially for the UAV during the flight. The recorded data during the flight can be extracted and used later for analysis, debugging and algorithm development part of the ADS.
The goal is to have the array and related electronic parts fit in the size of an AMMS. The exact size and weight of the array and related electronics cannot be determined at this stage, but we estimate that the unit will have a size of 23-30 cm (outer diameter) and a weight of 4-5 kg.

Dr. Zahra Madadi
Dr. Zahra Madadi is a scientist and signal processing engineer at Microflown AVISA B.V. She joined Microflown in May 2017 and since then, she is working on developing signal processing algorithms for different applications such as tracking and localization of multiple acoustic sources (UAVs, ground vehicles, gun shots, explosions) using distributed arrays of acoustic vector sensors, and machine learning algorithms for weather parameter estimation. Before joining Microflown, she has worked as a senior researcher at ElpaNav B.V. on developing algorithms for indoor localization using Bluetooth technology.
From Jan 2014 until Dec 2016, she was a post-doc research fellow at school of Electronic and Electrical Engineering of Nanyang Technological University (NTU) in Singapore, working in the field of statistical signal processing in two big projects: one for self-localization and tracking of a moving robot using signals of opportunities for DSTA of Singapore, and the other for autonomous vehicle localization using DSRC (802.11p) and its fusion with data from other sensors (GPS, IMU, Map,..) in collaboration with NXP from the Netherlands.
Zahra received her PhD from school of computer science and engineering in 2013 from NTU in Singapore, in the field of signal processing. During her PhD, she was working on developing nonlinear array signal processing algorithms for detection and localization of weak acoustic sources in shallow ocean in presence of non-Gaussian noise. She has received her BS (Bachelor of Science) and MS (Master of Science) degrees in electronics and telecommunication engineering, from Shahid Beheshti University and K.N.T. University of Technology in Tehran respectively.

Mr Michael Maassen
Mr Michael Maassen is working at Microflown AVISA since Feb 2015. He started as an electrical/test engineer and currently he is the lead of hardware development team. He spends part of his time in the field, being close to the actual shooters and loud explosives with the end-users for real-time feedback, doing field tests, integration projects, ... As a hardware lead team member, he tries to get the most out the hardware team, putting the best people on the right jobs and see them more as co-workers/friends to get the best out of them. He finds it always nice to learn new things and to apply new approaches to solve new problems. Michael received his Bachelor’s degree in electrical engineering from Saxion university of applied sciences in Enschede in 2015.
